AE
自编码器包含一个编码器和解码器,训练得到的中间特征表示 概括了数据的绝大部分信息,是一种良好的特征表示,可以应用于下游任务或者达到数据降维的目的。但AE模型有个显著的缺点是难以从隐变量中采样生成新的数据,网络并没有显式地学习 的分布。后续发展的变分自编码器弥补了这一短板。
VAE
VAE中约束了编码向量 ,训练过程中使 服从标准正太分布来达成采样生成的目的。
VAE的核心是变分推断,最初是用于估计难以积分计算的后验概率 ——使用分布族里的分布逼近后验分布,将后验概率的求解问题转化为了一个优化问题。

其中 和 $ p(x|z) $ 分别为先验和似然分布,分母处的高维积分是难以求解的,这就导致我们难以找出后验分布的解析解形式。
变分法:利用 逼近 ,这里选择高斯分布族进行逼近便于计算和推导。
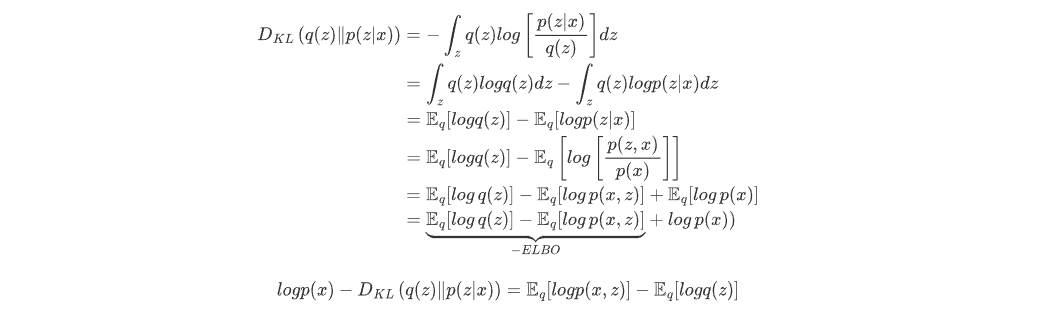
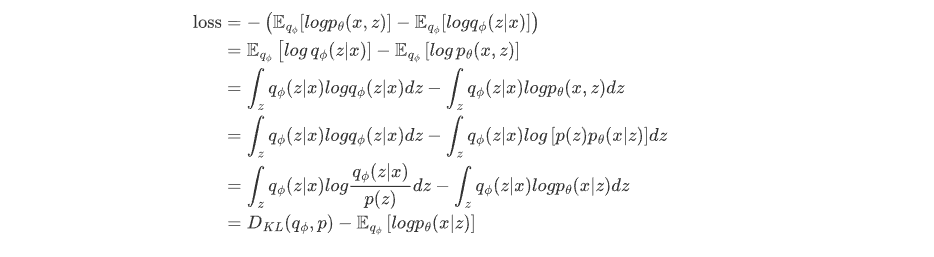
由于KL散度大于等于0,因此 。因此,当 分布难以计算时,常用最大化ELBO来近似最大化
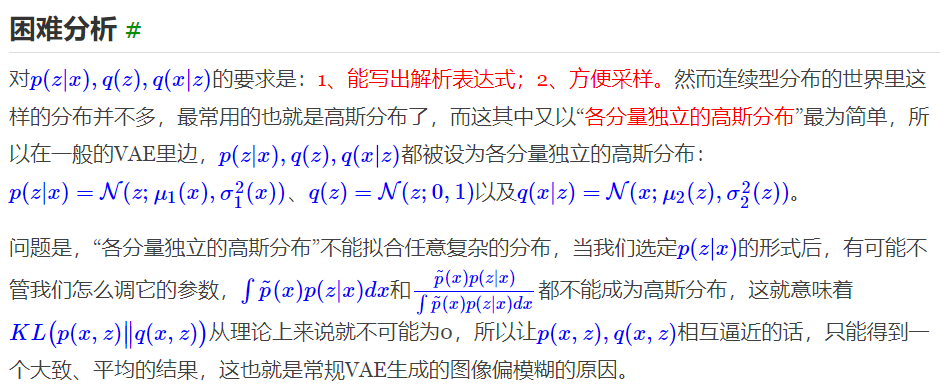
- 三个假设:
- 服从各变量独立的标准正态分布,模型使用的假设是后验分布是正态分布。后验分布向标准正太分布靠近的过程中,防止了噪声为0,且保证了生成能力,达到了先验假设。
- 服从各变量独立且方差为固定常数的高斯分布
高斯分布时,KL散度是有解析解的。隐变量为一维时有 :

VAE的本质结构: 重构的过程是希望没噪声的,而 KL loss 则希望有高斯噪声的,两者是对立的。所以,VAE 跟 GAN 一样,内部其实是包含了一个对抗的过程,只不过它们两者是混合起来,共同进化的。
前向过程:
- 编码器用于拟合 的近似分布 ,输出 和 。(变分后验分布的表达能力与计算代价的权衡一直是VAE领域的核心痛点)
- 从 中采样 ,解码器用于拟合似然分布 ,输出 ,方差为固定的超参。通过重参数化技巧得到 (因此重构过程受到噪声的影响,噪声的强度由方差决定,若方差为0,则模型退化为AE)
- 计算m次 得到损失
VAE的缺点:
- 生成过程不可控
- 生成图片模糊,不同的 可能采样得到相同的
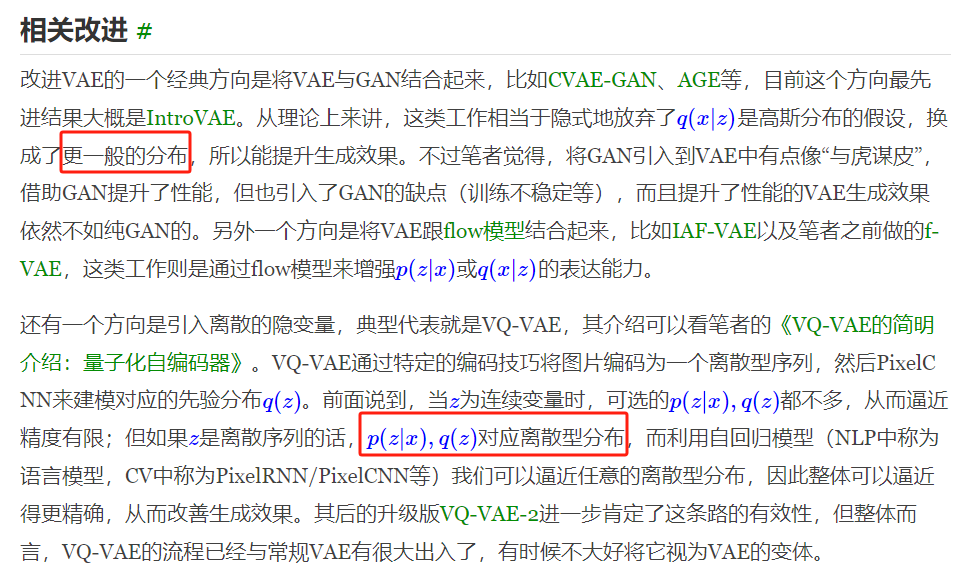
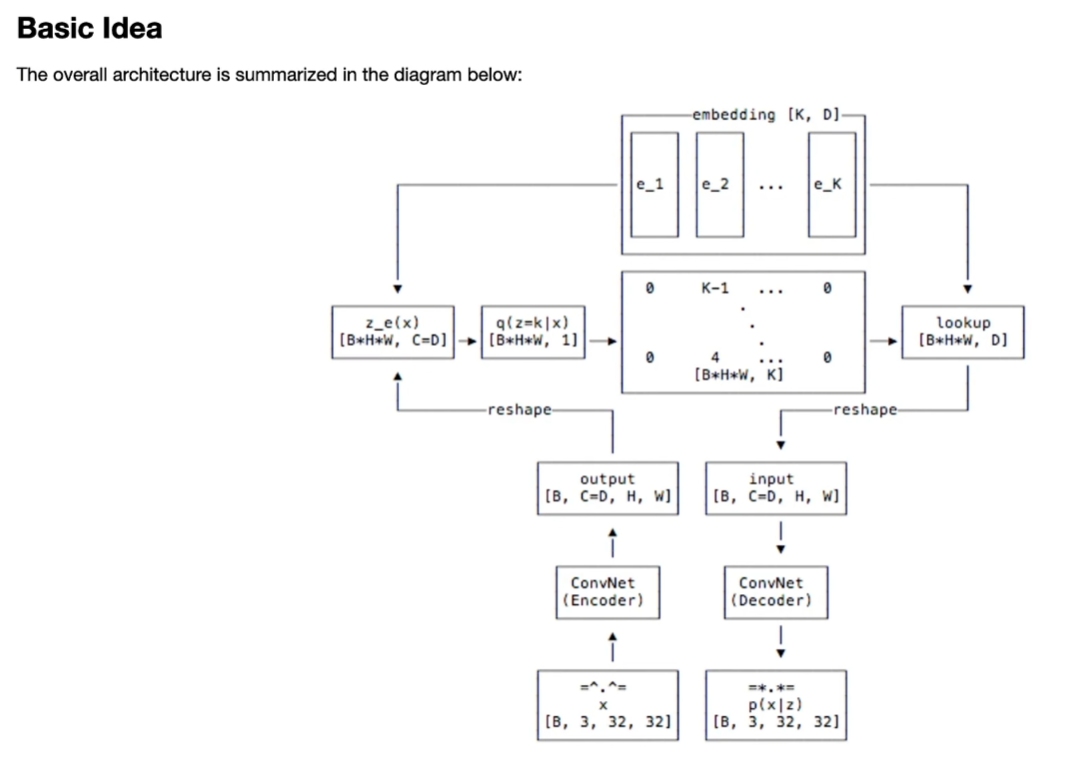
VQ-VAE
编码向量是离散的,先验分布不再固定(论文中先验分布是均匀分布与后验分布都是类别分布,两者KL散度为常数),可以避免后验坍塌的问题。
embedding space为[K, D],编码器输出隐变量 ,基于embedding space和 进行最近邻查找得到表征索引k,取出码本对应 作为最终编码器的输出 。
argmin导致不可导,将解码器输入部分梯度复制到编码器输出这部分,使得整个过程可导。
Diffusion model
背景
是否有一种生成模型,具有vae、gan、flow等模型的优点,只需要训练生成器,训练目标函数简单,不需要训练判别器或后验分布等,并且模型表达能力不受限。vae从数据分布->标准高斯分布->数据分布,diffusion从数据分布->标准高斯分布,生成器拟合逆过程即可。
训练过程
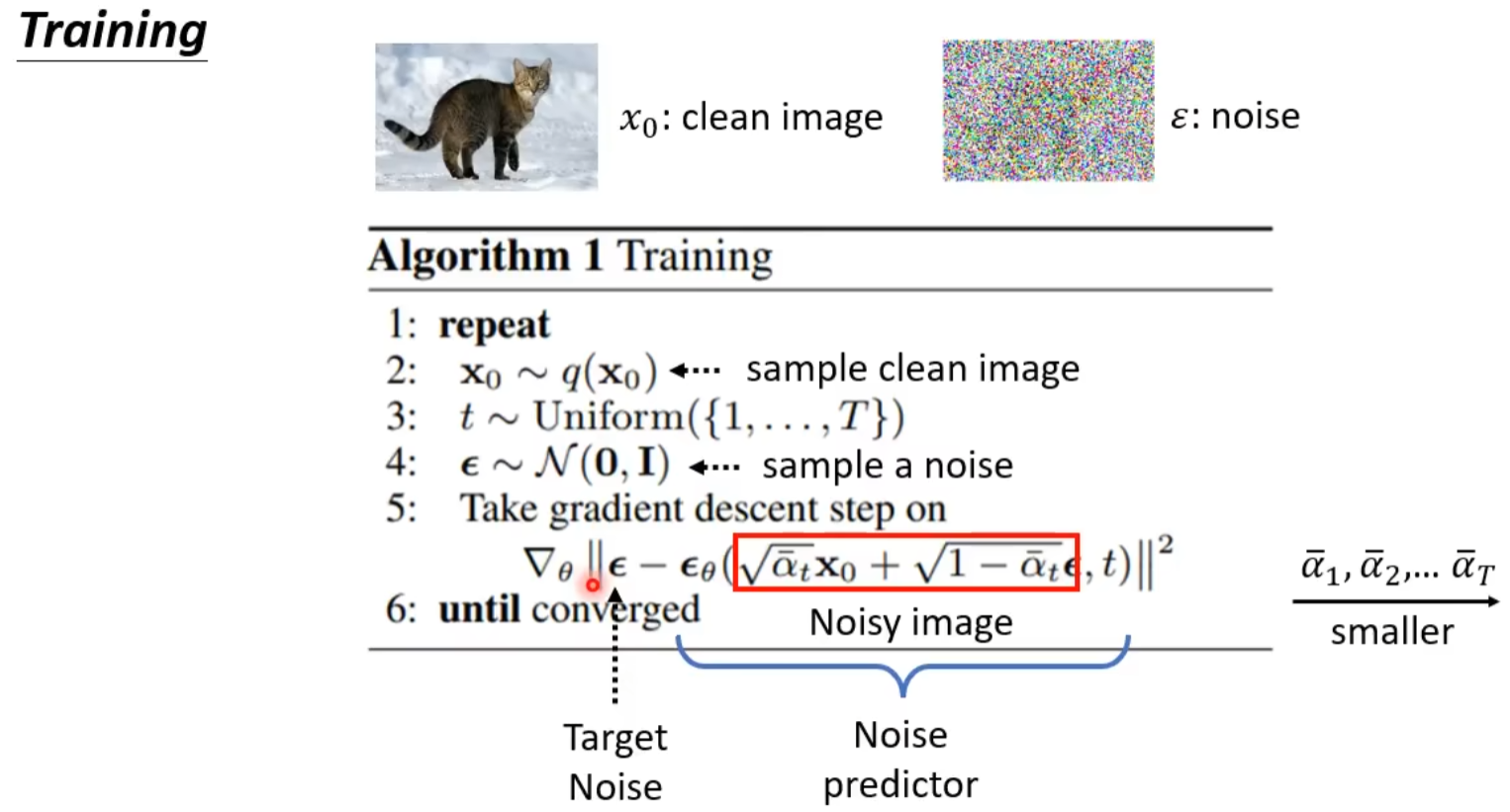
红框内的系数是为了控制不同时间步添加噪声的大小。
DDPM:
- 输入:噪声图像、时间步
- 输出:预测的噪声
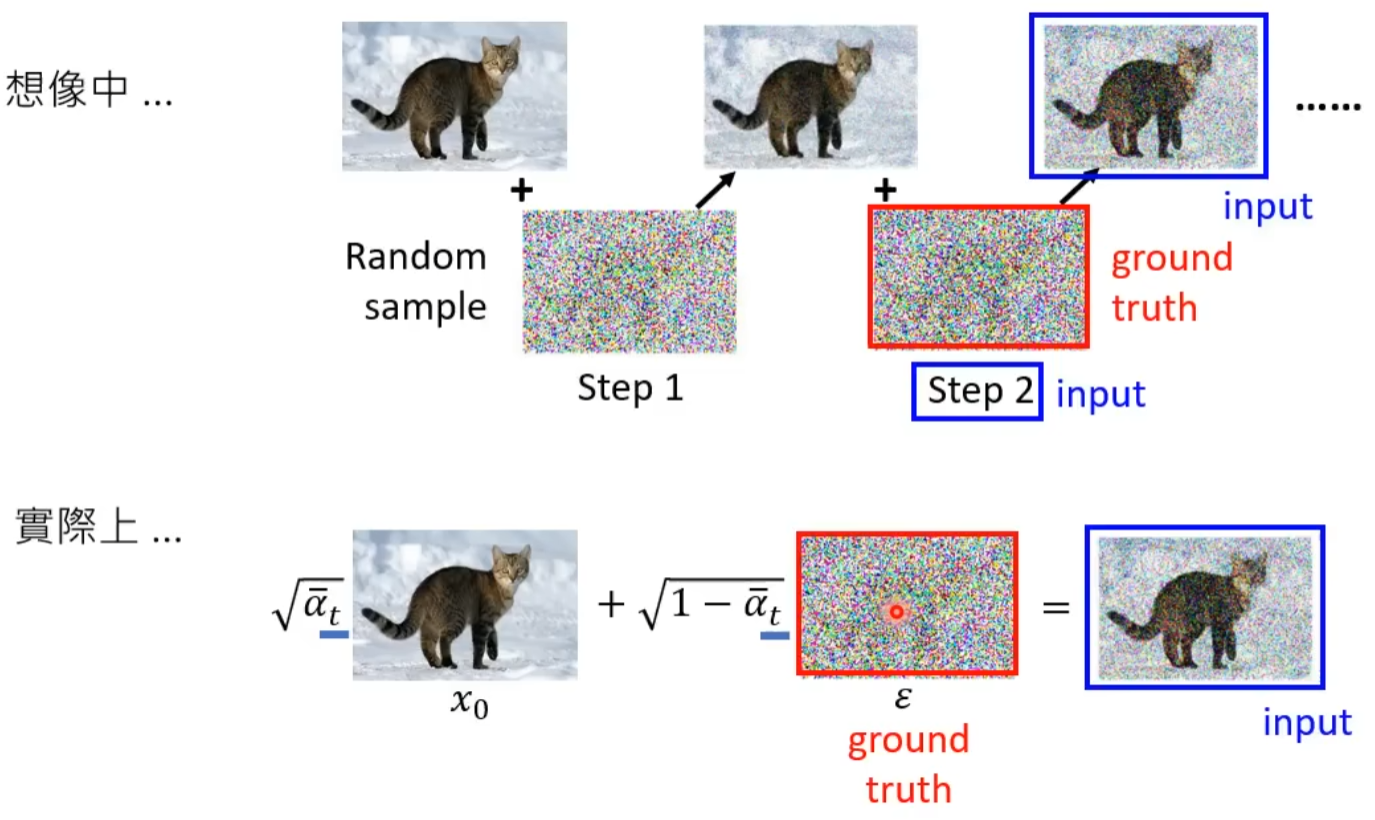
上图反映了 加噪过程 实际上并没有一步一步的加入噪声,而是 一次 就将噪声加进去, 去噪过程 也是 一次 就将预测噪声输出了。
推理过程
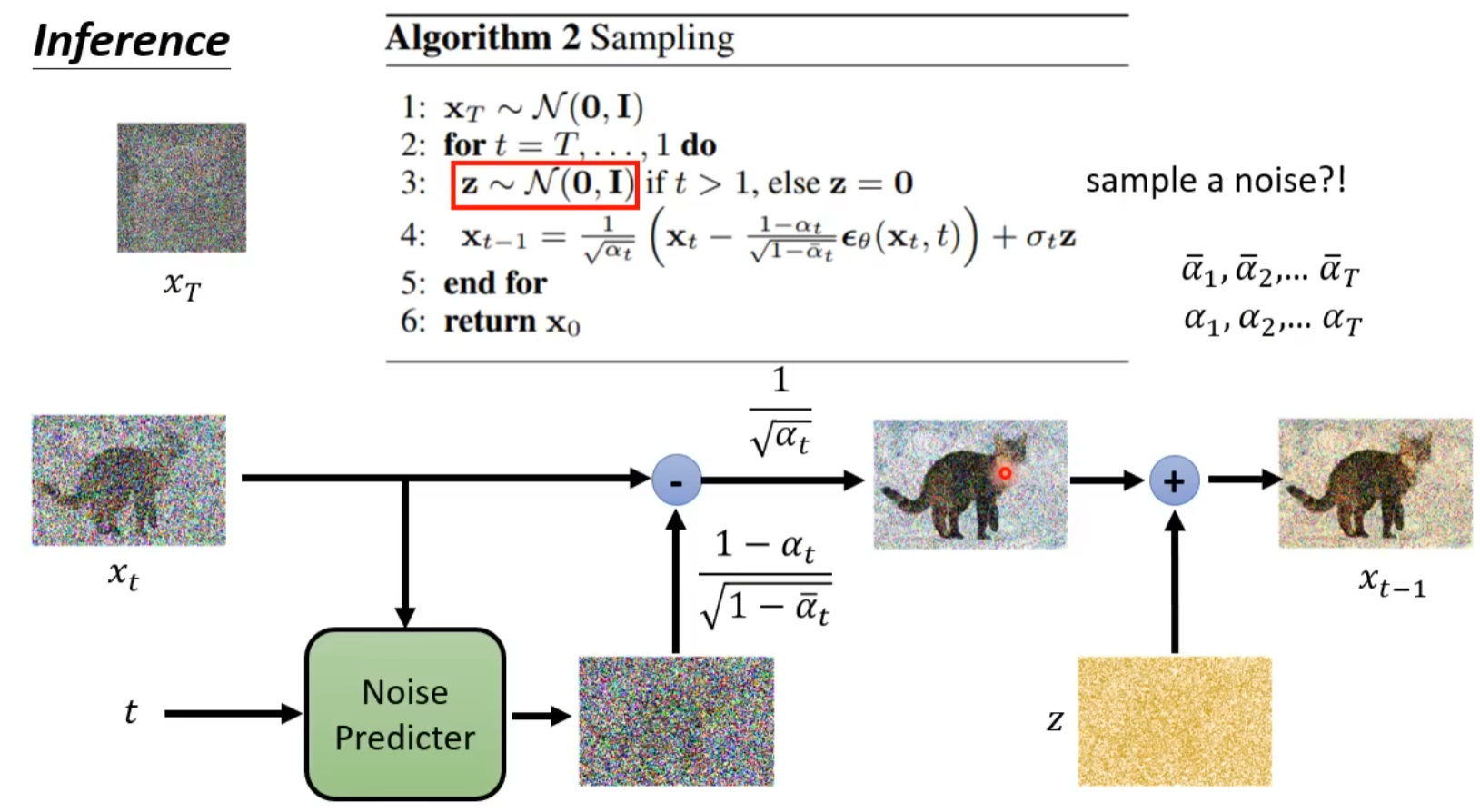
为什么DDPM中又加入了一次噪声才生成最终的去噪图片?
prediction裡加noise的概念在score-based generative model相關的paper中有提到,比較像是預測結果不應該收斂在一個特定的位置(a point in density region),而是要在一個分布範圍(density region)。換句話說,如果每次update是得到一個向量(score function)朝向一個點,那noise就是讓這個向量(noisy score)轉換成朝向一個可能的範圍。讓結果從預測”一個固定方向”,轉成是要預測”一個固定範圍”,這只要sigma 足夠小,預測目標結果的分布範圍就會成立。
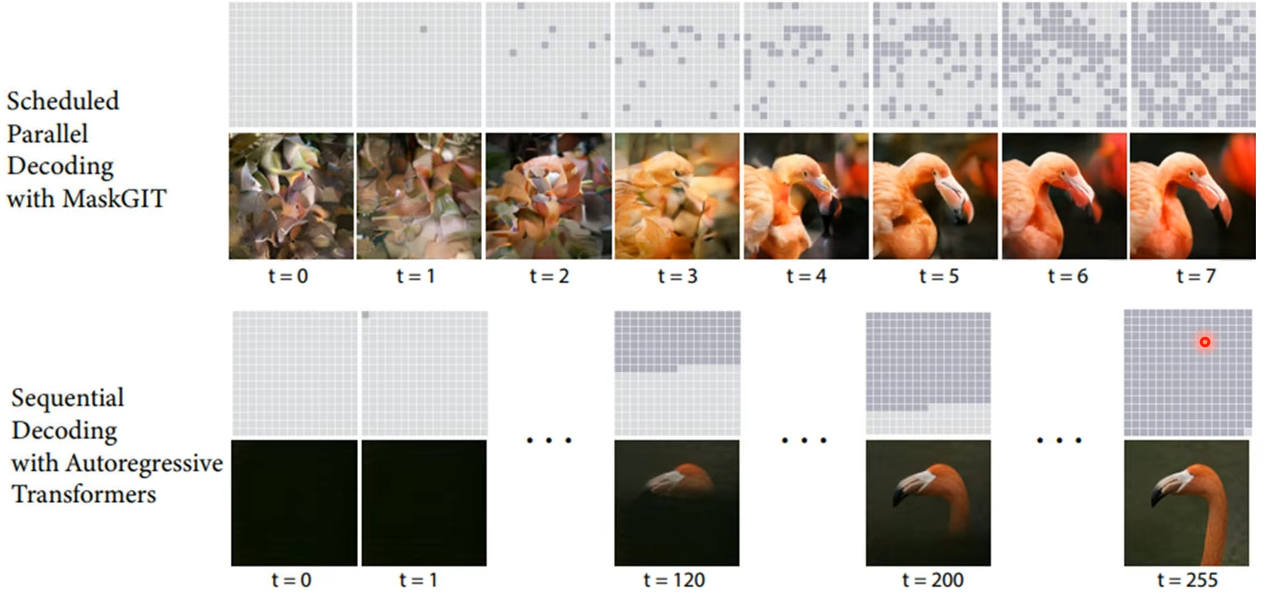
扩散模型可能不是那么重要,重点是怎么将一次生成加入自回归生成中。
DDPM核心代码
1 | # 损失计算(https://github.com/abarankab/DDPM/blob/main/ddpm/diffusion.py) |
##引入条件的几种方式
-
输入端
Concatenation,将其作为UNet输入中的额外通道进行输入。当条件特征与图像特征形状相同时,例如分割蒙版、深度图或图像的模糊版本(在恢复/超分辨率模型的情况下)时,通常会使用这种方法。它也适用于其他类型的条件。例如,类标签被映射到嵌入向量,然后扩展到与输入图像相同的宽度和高度,以便将其作为额外通道输入。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41class ClassConditionedUnet(nn.Module):
def __init__(self, num_classes=10, class_emb_size=4):
super().__init__()
# The embedding layer will map the class label to a vector of size class_emb_size
self.class_emb = nn.Embedding(num_classes, class_emb_size)
# Self.model is an unconditional UNet with extra input channels to accept the conditioning information (the class embedding)
self.model = UNet2DModel(
sample_size=28, # the target image resolution
in_channels=1 + class_emb_size, # Additional input channels for class cond.
out_channels=1, # the number of output channels
layers_per_block=2, # how many ResNet layers to use per UNet block
block_out_channels=(32, 64, 64),
down_block_types=(
"DownBlock2D", # a regular ResNet downsampling block
"AttnDownBlock2D", # a ResNet downsampling block with spatial self-attention
"AttnDownBlock2D",
),
up_block_types=(
"AttnUpBlock2D",
"AttnUpBlock2D", # a ResNet upsampling block with spatial self-attention
"UpBlock2D", # a regular ResNet upsampling block
),
)
# Our forward method now takes the class labels as an additional argument
def forward(self, x, t, class_labels):
# Shape of x:
bs, ch, w, h = x.shape
# class conditioning in right shape to add as additional input channels
class_cond = self.class_emb(class_labels) # Map to embedding dimension
class_cond = class_cond.view(bs, class_cond.shape[1], 1, 1).expand(bs, class_cond.shape[1], w, h)
# x is shape (bs, 1, 28, 28) and class_cond is now (bs, 4, 28, 28)
# Net input is now x and class cond concatenated together along dimension 1
net_input = torch.cat((x, class_cond), 1) # (bs, 5, 28, 28)
# Feed this to the UNet alongside the timestep and return the prediction
return self.model(net_input, t).sample # (bs, 1, 28, 28) -
创建嵌入后,将其投影到与
UNet内部一层或多层输出通道数量相匹配的大小,然后将其添加到这些输出中。例如,每个Resnet块的输出都添加了一个投影的时间步条件嵌入以及Stable Diffusion 中图像条件的嵌入方式。 -
网络中融入
Cross atttention(LSD)。当条件以某些文本形式存在时,这是最有用的 - 该文本使用变换器模型映射到一系列嵌入,然后在UNet中使用交叉注意力层将此信息合并到去噪路径中。 -
ControlNet额外训练一个组件,不微调SD
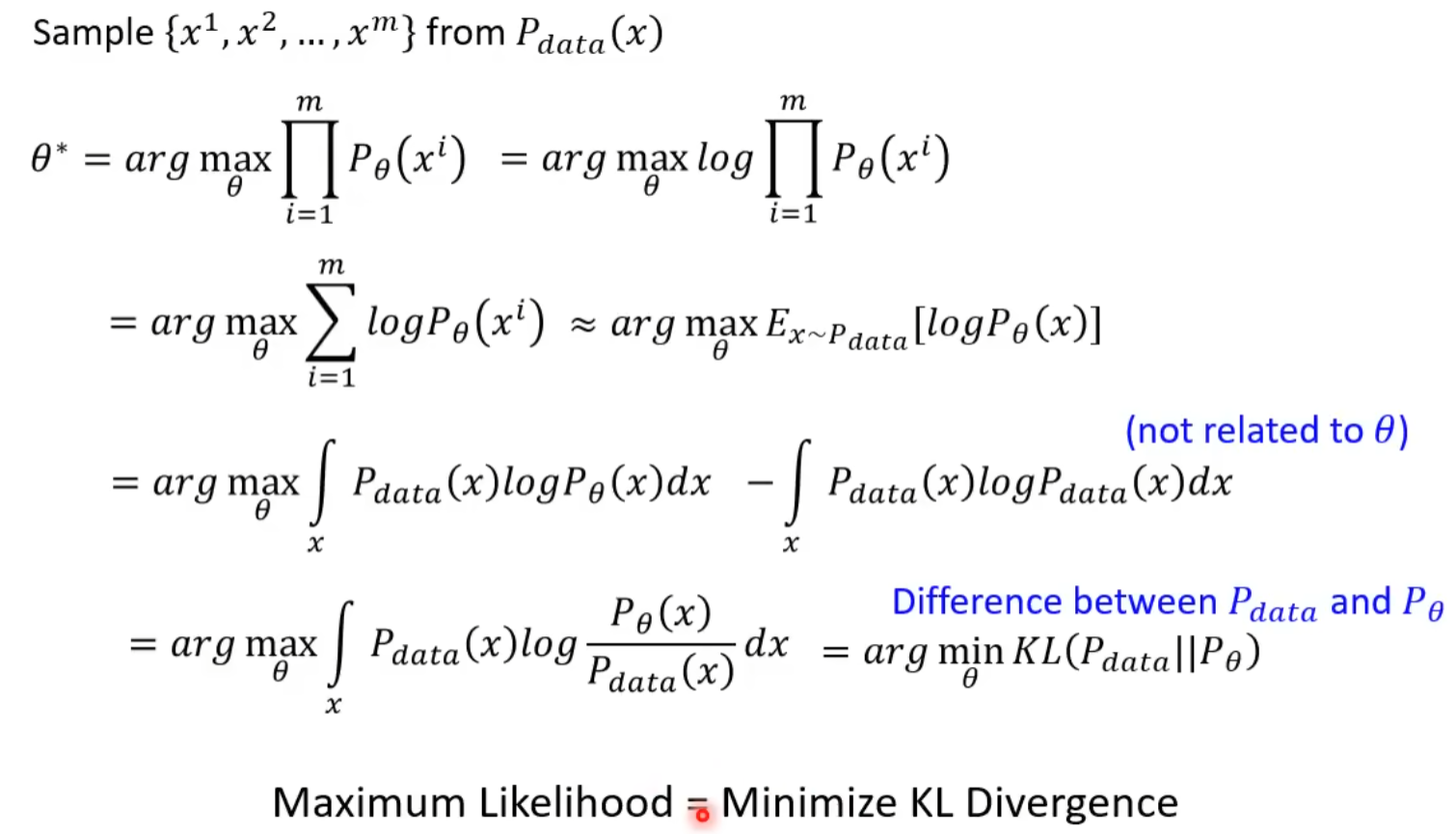
生成模型的目标
极大似然与KL散度的关联性
认知模态生成
Brain2img——方法总结
1. MindDiffuser
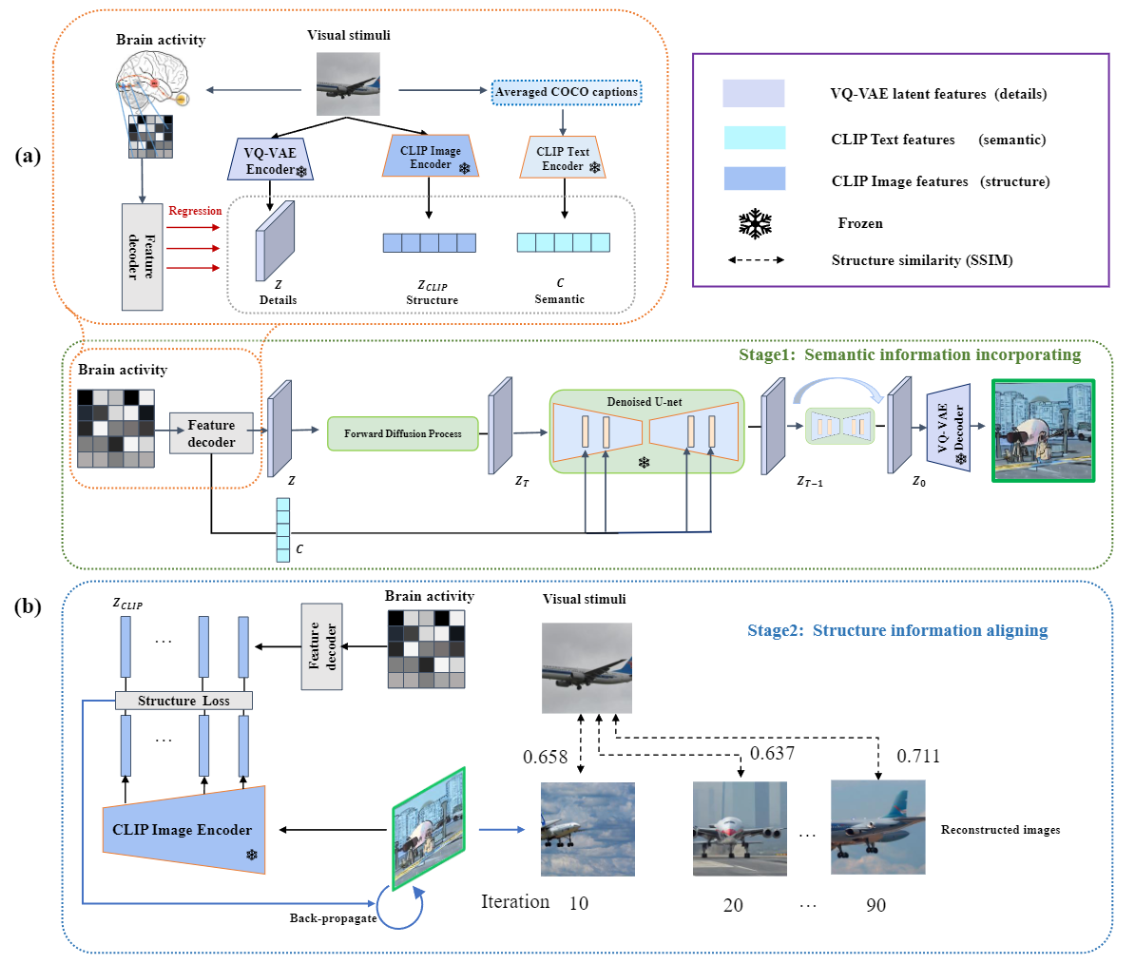
step1:训练三个全连接层直接将脑信号映射到不同的嵌入空间,然后使用训练得到的模型,输入 Brain activity 并使用得到的 z 、c 向量重构原图。( 直接映射已经可以生成语义一致的图片 ,并没有设计复杂的对齐损失)
step2: 提取CLIP图像编码器的浅层线性层特征,如图2 (b)所示。然后,使用 fMRI 解码每一层对应的 CLIP 视觉特征,并计算两者之间的 L2 距离对齐结构信息。
Note: 仅仅使用了 mse loss ,对齐的约束只要有就可以,没有设计特定的对齐损失就取得了很好的效果。
定量指标:
- CLIP相似度: 重建图像和原图在CLIP图像分支输出向量的余弦相似度,衡量二者的语义相似度
- PCC: 重建图像和原图的皮尔逊相关系数,衡量二者的结构相似度
- SSIM: 衡量二者的结构相似度
- FID: 计算重建图像和原图分布的相似性,从整体上衡量重建图像的真实程度与多样性
Seeing through the Brain
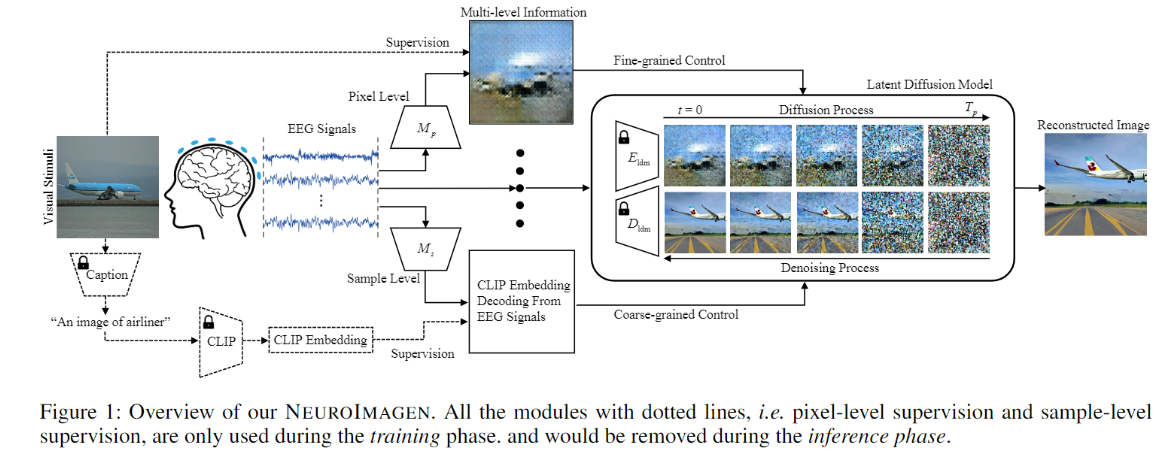
-
Pixel-level Semantics Extraction:扩散模型的输入是由生成器生成的粗粒度图像,而不是某个隐向量,需要单独训练一个生成器(额外的损失设计),增加了训练的负担。脑电与图片的对齐使用了对比损失
-
Sample-level Semantics Extraction:同样将对齐后的语义作为条件融合去噪过程,保证语义一致
Note: 脑信号的监督信号是预训练获得的 隐向量 还是 原始刺激
DreamDiffusion
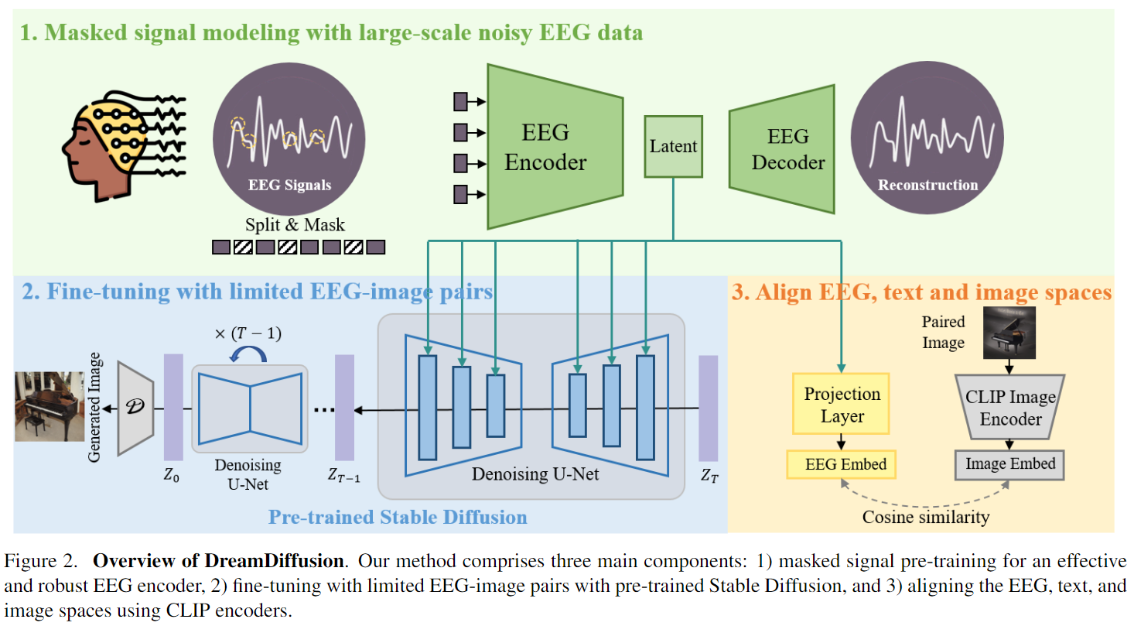
-
step1:利用了较大规模上预训练的EEG模型
-
step2:同时优化EEG编码器和UNet的cross-attention部分
-
step3:利用余弦相似度对齐EEG与图文,训练过程中会优化EEG编码器,使得对齐后的EEG_latent便于微调SD模型
Note:此处的对齐方式使用了余弦相似度,以上几篇基于扩散模型的方法中对齐损失都比较简单,没有设计和复杂的损失